Wenxi Wu
How to make a master joint (both revolute and prismatic) in URDF file
This is a tutorial for specifying a joint that is both prismatic and revolute in URDF file.
URDF does not provide specification for a joint that is both revolute and pismatic. Two joints cannot connect directly. Therefore, we need to make a revolute joint and a prismatic joint connected by a dummy link.
revolute joint – dummy link – prismatic joint
Example code
Code of an example joint in URDF file
Revolute joint:
<joint name="upperarm_roll_joint" type="revolute">
<origin rpy="0 0 0" xyz="0.219 0 0" />
<parent link="shoulder_lift_link" />
<child link="dummy_link" />
<axis xyz="1 0 0" />
<dynamics damping="5.0" />
<limit effort="66.18" lower="-2.251" upper="2.251" velocity="1.521" />
</joint>
Dummy link:
<link name="dummy_link">
</link>
Prismatic joint:
<joint name="upperarm_prismatic_joint" type="prismatic">
<origin rpy="0 0 0" xyz="0 0 0" />
<parent link="dummy_link" />
<child link="upperarm_roll_link" />
<axis xyz="1 0 0" />
<limit effort="60" lower="0.0" upper="0.20" velocity="0.05" /><dynamics damping="100.0" />
</joint>
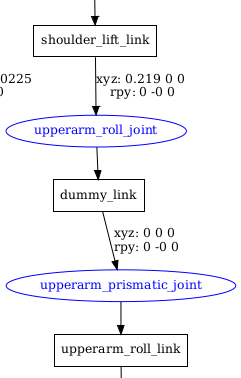
Visualization
To generate the tree in pdf file:
sudo apt-get install liburdfdom-tools
urdf_to_graphiz robot.urdf
To visualize the urdf in RVIZ:
roslaunch urdf_tutorial display.launch model:=PATH_TO_URDF
Useful links:
http://wiki.ros.org/urdf/XML/joint
https://articulatedrobotics.xyz/tutorials/ready-for-ros/urdf/